Manipulation of a robotic arm
This is our final project for RBE3001(C-term 2022, Robot Manipulation @ WPI). We made use of forward/inverse kinematics, trajectory generation, and computer vision to have a robot arm to autonomously detect balls of different color and sort them. Team size: 3.
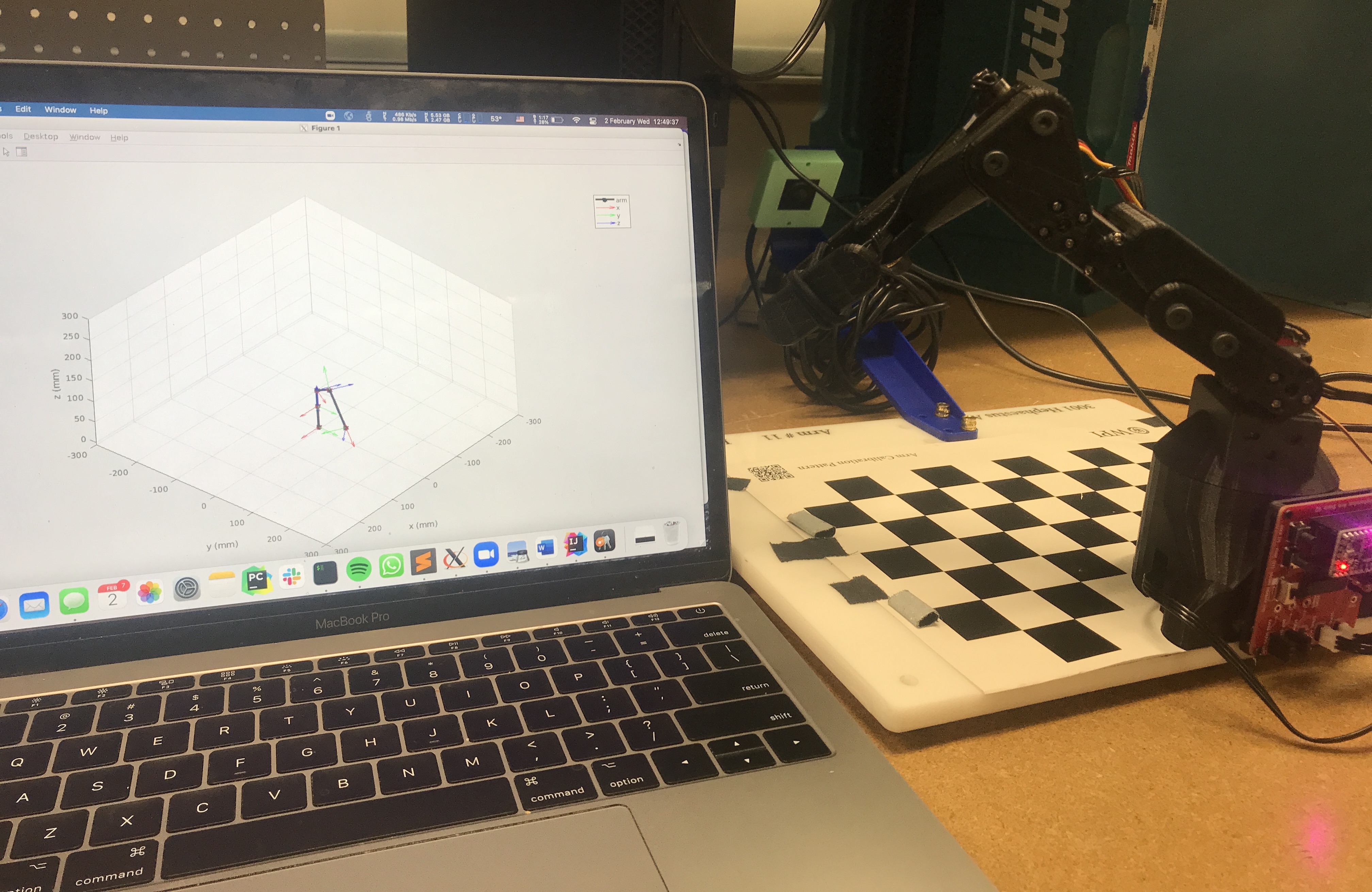
This robot arm platform was provided as a part of this course. Aside from the main task of autonomously detect balls of different color and sort them, there were three side-goals: dynamically hovering over a ball, detecting and picking non-ball objects, and simultaneous URDF visualization in ROS/Gazebo and MATLAB.
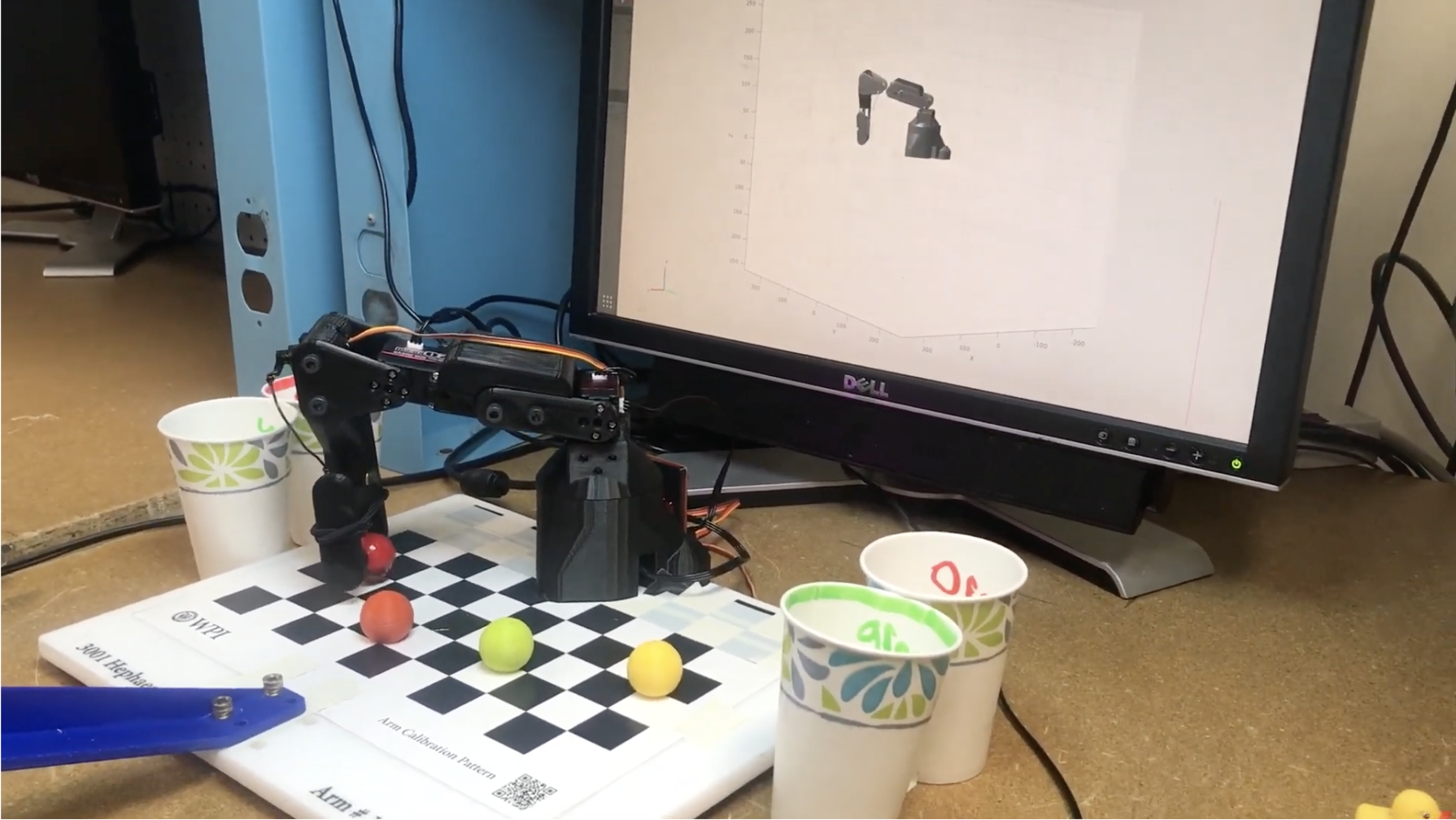
We used DH parameters for defining frames and transformations. For moving between configurations, we implemented functions that generated and executed polynomial(quintic) trajectories. An external USB camera was used to detect objects on the checkerboard using relevant MATLAB packages and a computer vision pipeline.
According to the course copyright, I am not allowed to share my code publicly, however, feel free to watch the demo video I made on the right!